JonathanWagenet
Rotary 3D Printer
Group: Jordan Briggs, Austin Jarvis, Stefan Soezeri, Jonathan Wagenet
Purpose
- Develop 3D printer to which prints on a cylindrical surface (an “additive lathe”) to produce stronger cylindrical structures and apply mechanical engineering knowledge to a capstone project.
Objectives
- Replace traditional cartesian y-axis with rotation spindle on 3D printer.
- Build frame and motion system from scratch.
- Use RepRap electronics and software to handle printer control.
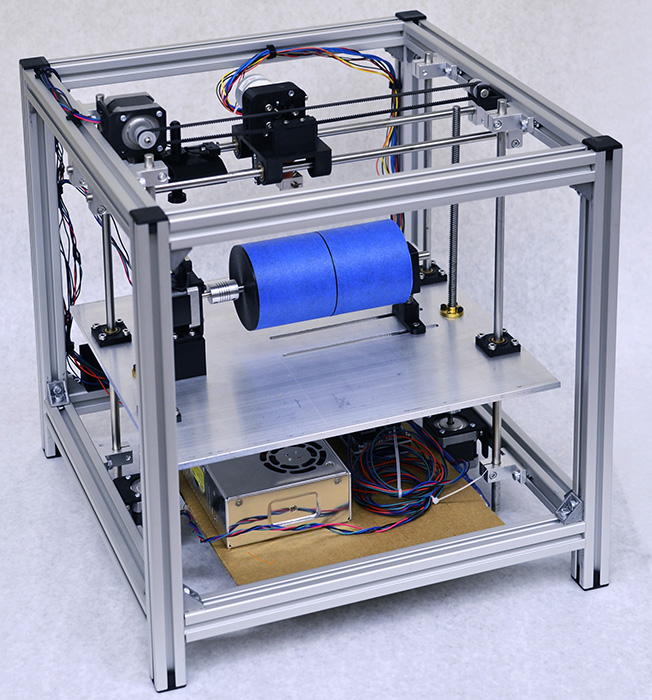
All packaging assembled together (left). Solidworks model of electronics support (right).
Development Process
- Evaluate existing 3D printer designs for ideas on how to implement motion.
- Consider print material choices and their impact on ease of implementation and printing.
- Select control motors based on anticipated loading, and verify usability from loading analysis.
- Design printer in CAD, and prepare drawings for manufacturing and assembly.
- Manufacture components and assemble printer. Iterate component designs with 3D printing.
- Calibrate and test electronic control system.
Design Choices
- Timing belt driven x-axis
- Lead screw driven z-axis
- Adjustable spindle support to level print bed
- T-Slot frame
- 3D printed components
- PLA Printing
- Use RepRap Arduino control and Cura for slicing
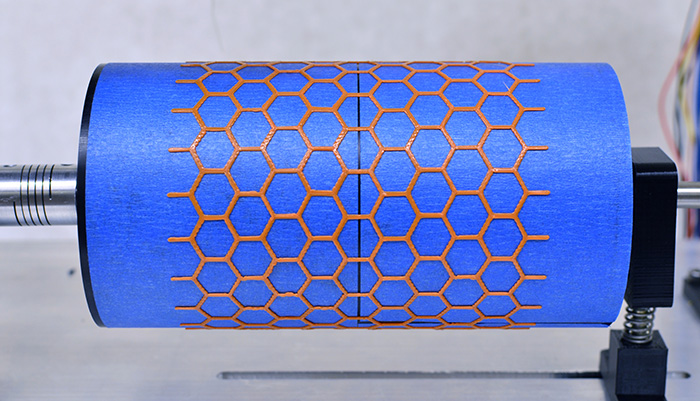
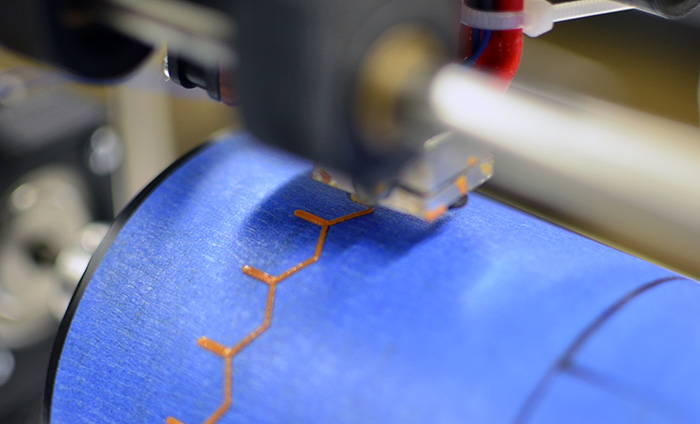
Hexagonal test pattern printed on cylinder.
Contributions
- For this project I was in charge of designing and implementing the spindle axis and the extruder. The spindle is driven by a stepper motor and is supported by an adjustable print support to level the surface. Delrin is the selected print surface because of its good maintainability and thermal stability. The extruder is based ona filament feeder and hot end from the 3D printing community. I also designed an adjustable screw which mounts on the x-axis rails which facilitates precise calibration of the z-axis homing position. Many parts were conceptually designed to be made from aluminum, but I redesigned them to be quickly made and tested with 3D printing. Additional parts like wiring clips and t-slot nuts were also made cheaply with PLA.Following assembling the mechanical structure, I took charge in testing and calibrating the electronics, and setting up the controller software. 3D models and drawing is SolidWorks.
Issues and Improvements
- Current design wraps cartesian models around surface. Tailored software may provide better results.
- Current print cylinder is too heavy for driving motor, causing vibration and print imperfections.
- No easy way to remove prints from the cylinder intact. Need to design surface to easily release print.
- Add a y-axis back to the system for 4 axis printing and look into possible benefits of printing on a flat surface using additional axes.